Sequential neural posterior estimation#
Sequential neural posterior estimation (SNPE) is an algorithm for fitting posterior distributions to intractable simulator models. SNPE uses multiple rounds of simulations, in which posterior estimates from each round are used as proposal distributions for the subsequent round. This can lead to much higher simulation efficiency compared to a single round approach. The variant of SNPE used here is often referred to as SNPE-C, as described by Greenberg et al. (2019) and Durkan et al. (2020).
[6]:
import equinox as eqx
import jax.numpy as jnp
import jax.random as jr
import matplotlib.pyplot as plt
from jax import vmap
import flowjax.bijections as bij
from flowjax.distributions import Normal, Transformed
from flowjax.flows import masked_autoregressive_flow
from flowjax.tasks import GaussianMixtureSimulator
from flowjax.train import fit_to_data
from flowjax.train.losses import ContrastiveLoss, MaximumLikelihoodLoss
The task we consider is to infer the mean of a mixture of two two-dimensional Normal distributions, in which one of the distributions has a much broader variance.
[7]:
task = GaussianMixtureSimulator()
# Generating an "observation"
key, subkey = jr.split(jr.key(0))
theta_true = task.prior.sample(subkey)
key, subkey = jr.split(key)
observed = task.simulator(subkey, theta_true)
We use an affine masked autoregressive flow as our proposal/posterior estimator
[8]:
key, subkey = jr.split(key)
proposal = masked_autoregressive_flow(
subkey,
base_dist=Normal(jnp.zeros(2)),
transformer=bij.Affine(),
cond_dim=observed.size,
)
As the task is defined on bounded support \([-10, 10]\), we define a map to the unbounded domain which often is more stable for training. In some cases, some care might have to be taken to ensure numerical stability e.g. with clipping!
[9]:
to_unbounded = bij.Chain(
[
bij.Affine(jnp.zeros(task.dim), 1 / task.prior_bound), # to [-1, 1]
bij.Invert(bij.Tanh((task.dim,))), # Arctanh (to unbounded)
],
)
unbounded_prior = Transformed(task.prior, to_unbounded)
For SNPE, training using the standard maximum likelihood loss would lead to biased posterior estimates if used over multiple rounds of simulations. Instead, following the approach here, we use MaximumLikelihoodLoss for the first round, followed by ContrastiveLoss for any subsequent rounds. Here we carry out SNPE using 3 rounds of simulations.
[11]:
sim_per_round = 1000
data = {"theta": [], "simulations": []}
losses = []
for r in range(3):
# Carry out simulations (from prior for round 1, the running proposal otherwise).
key, subkey = jr.split(key)
if r == 0:
theta_r = unbounded_prior.sample(subkey, (sim_per_round,))
loss_fn = MaximumLikelihoodLoss()
else:
theta_r = eqx.filter_jit(proposal.sample)(
subkey, (sim_per_round,), condition=observed,
)
loss_fn = ContrastiveLoss(unbounded_prior, n_contrastive=10)
key, subkey = jr.split(key)
simulations_r = task.simulator(
key=subkey,
theta=vmap(to_unbounded.inverse)(theta_r), # Map to bounded for simulating
)
data["theta"].append(theta_r)
data["simulations"].append(simulations_r)
key, subkey = jr.split(key)
proposal, losses_r = fit_to_data(
key=subkey,
dist=proposal,
data=(
jnp.concatenate(data["theta"]),
jnp.concatenate(data["simulations"]),
),
loss_fn=loss_fn,
learning_rate=5e-5,
max_patience=10,
)
losses.append(losses_r)
100%|██████████| 100/100 [00:08<00:00, 11.29it/s, train=0.277, val=0.213]
36%|███▌ | 36/100 [00:16<00:30, 2.12it/s, train=0.652, val=0.634 (Max patience reached)]
21%|██ | 21/100 [00:15<00:57, 1.36it/s, train=0.74, val=0.809 (Max patience reached)]
We can map the posterior distribution, and the \(\theta\) samples from each round back to the bounded domain
[12]:
# Undo preprocessing (map everything back to bounded domain)
posterior = Transformed(proposal, bij.Invert(to_unbounded))
data["theta"] = [vmap(to_unbounded.inverse)(t) for t in data["theta"]]
# Append posterior samples
key, subkey = jr.split(key)
data["theta"].append(
posterior.sample(
subkey, (sim_per_round,), condition=observed,
),
)
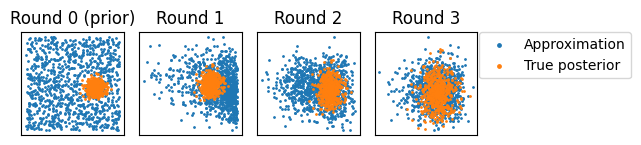
[15]:
key, subkey = jr.split(key)
reference_posterior = task.sample_reference_posterior(subkey, observed, sim_per_round)
fig, axes = plt.subplots(ncols=len(data["theta"]))
for r, (ax, samps) in enumerate(zip(axes, data["theta"], strict=True)):
ax.scatter(samps[:, 0], samps[:, 1], s=1, label="Approximation")
ax.scatter(
x=reference_posterior[:, 0],
y=reference_posterior[:, 1],
s=1,
label="True posterior",
)
title = "Round 0 (prior)" if r == 0 else f"Round {r}"
ax.set_title(title)
ax.set_box_aspect(1)
ax.xaxis.set_ticks([])
ax.yaxis.set_ticks([])
lgnd = plt.legend(bbox_to_anchor=(1.02, 1), loc="upper left", borderaxespad=0)
for handle in lgnd.legend_handles:
handle.set_sizes([6.0])
plt.tight_layout()
plt.show()
[ ]: